GIẢI PHÁP HOẠT ĐỘNG NÂNG HẠ CONTAINER TẠI CẢNG
- 07/04/2016
- 7714
GIẢI PHÁP KỸ THUẬT NÂNG HẠ CONTAINER TẠI CẢNG
A - HIỆN TRẠNG HOẠT ĐỘNG NÂNG HẠ CONTAINER TẠI CẢNG
Hoạt động nâng hạ container bằng máy nâng container đòi hỏi phải xác định vị trí của container bởi các tham số DÃY-HÀNG-TẦNG (BAY-ROW-TIER). Mỗi khi container được bốc gỡ hoặc được hạ đòi hỏi phải cập nhật lại vị trí vào dữ liệu nghiệp vụ để phục vụ theo dõi và giám sát thời gian thực vị trí từng container trong cảng.
Hiện tại, vị trí BAY-ROW-TIER được nhân viên lái xe nâng container cập nhật bằng tay. Thao tác thủ container đòi hỏi nhân viên nhân viên lái xe nâng container phải thuộc lòng hàng nghìn vị trí trong cảng. Thao tác thủ container không những giảm tốc độ thao tác nghiệp vụ mà còn rất dễ gây nhầm lẫn. Để nâng hoặc hạ 01 container không chỉ cập nhật lại vị trí của container đó mà còn cập nhật lại vị trí của cả những container bị dịch chuyển để bốc gỡ được container cần nâng, nghĩa là nhân viên phải thao tác rất nhiều lượt để cập nhật lại vị trí các container trong 01 lượt nâng-hạ container.
Tự động hoá thao tác xác định vị trí container bằng phần mềm ứng dụng GPS và GIS sẽ gia tăng tốc độ thao tác nghiệp vụ, giảm thiểu sai sót có yếu tố con người, tối ưu hoá container năng của cảng.
Để xác định được vị trí container dựa trên toạ độ và cao độ đòi hỏi độ chính xác dưới 20cm trên tất cả các hướng. Tuy nhiên, khi GPS lần đầu tiên được đưa vào dịch vụ, quân đội Mỹ lo ngại về khả năng các lực lượng đối phương sử dụng tín hiệu GPS có sẵn trên toàn cầu để hướng dẫn hệ thống vũ khí của riêng họ. Để tránh điều này, các tín hiệu "thô" (C/A) truyền đi trên các tần số L1 (1575,42 MHz) đã cố tình bị làm giảm chất lượng, bằng cách gây ra sai lệch ngẫu nhiên trong tín hiệu đồng hồ, tương đương với sai số khoảng 100 mét về khoảng cách. Do đó để ứng dụng GPS xác định vị trí container đòi hỏi phải sử dụng công nghệ GPS nâng cao để vi chỉnh sai số về mức khả dụng.
Ngoài ra, ứng dụng xác định vị trí container-ten-nơ đòi hỏi đo động và xử lý tức thời, vì vậy các tín hiệu cải chính phải được xử lý ngay tại các xe nâng container và truy vấn được trực tiếp dữ liệu vị trí toàn cảng để tính toán ra được BAY-ROW-TIER bất cứ thời điểm nào.
B – CÁC CÔNG NGHỆ ĐỊNH VỊ CÓ ĐỘ CHÍNH XÁC CAO
1. Container nghệ Định vị Toàn cầu vi sai (DGPS)
Các tín hiệu vi chỉnh thường được phát ở dạng sóng radio UHF. Các tần số này cũng thường được sử dụng cho đài phát thanh gần biển, gần sông lớn và bến cảng. Dự án Quy hoạch mạng lưới trạm định vị toàn cầu (GPS) trên lãnh thổ Việt Nam được Cục Đo đạc và Bản đồ Việt Nam triển khai từ năm 2012. Dự án gồm Trạm xử lý trung tâm tại Hà Nội, khoảng 12 trạm đo mạng lưới trắc địa, trạm định vị vệ tinh cố định (DGPS) phủ trùm toàn bộ lãnh hải Việt Nam và khoảng hơn 30 trạm tại hai khu vực kinh tế trọng điểm phía Bắc và phía Nam .
Ưu điểm của DGPS là chỉ cần 01 trạm phát container suất lớn dùng chung cho cả khu vực.
Tuy nhiên, DGPS hướng đến các ứng dụng dẫn đường hàng hải và đo sâu nên sai số vẫn lớn hơn 1m. Với vị trí cách xa trạm tham chiếu và điều kiện thời tiết khác thường thì sai số có thể lên đến 3-5m. Ngoài ra, phương thức hiệu chỉnh vi sai qua sóng radio UHF không phù hợp trong điều kiện cảng có nhiều góc khuất và khối sắt thép gây cản sóng. Vì vậy container nghệ DGPS không phù hợp với ứng dụng xác định vị trí container.
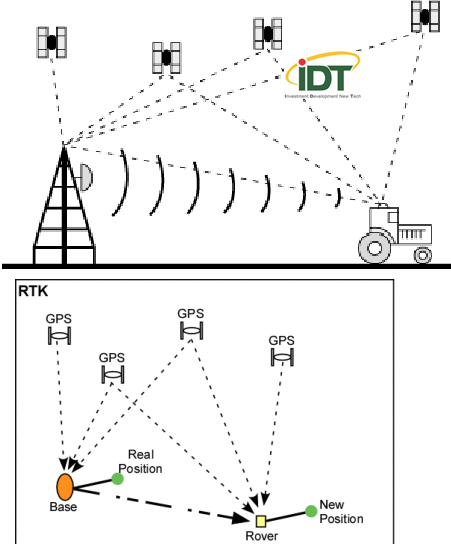
2. Công nghệ đo động thời gian thực chính xác cao - RTK (Real Time Kinematic)
RTK là kỹ thuật đo động thời gian thực. Về nguyên tắc, RTK tương tự DGPS. Tuy nhiên, trong kỹ thuật đo RTK, trạm cơ sở - base sẽ truyền giá trị đo pha về trạm động – rover. Trạm động sẽ thành lập các trị đo pha ở dạng hiệu đôi để xử lý. Vì vậy RTK còn được gọi là DGPS dùng trị đo pha.
RTK thường dùng một quá trình khởi động ON-THE-FLY (OTF), trong đó việc khởi động được thực hiện trong khi máy thu chuyển động. Chu kỳ mất khoá vệ tinh có thể bỏ qua và không cần khởi động tĩnh để xác định lại tham số đa trị. Hiện có nhiều kỹ thuật tăng độ chính xác RTK trong khu vực hẹp như đặt trạm thu ở các vị trí đã biết.
Vì trị đo pha có độ chính xác đến mm nên độ chính xác định vị có thể đạt đến cm hoặc dm phụ thuộc vào việc giải tham số đa trị N trong trị đo pha. Nếu 100% các tham số đa trị được giải, ta sẽ có nghiệm fix là nghiệm chính xác nhất. Nếu chỉ giải được 1 phần ta có nghiệm partial và nhận được nghiệm float nếu không giải được tham số đa trị.
Việc giải thành công các tham số đa trị chỉ dựa vào các trị đo pha ngay tại thời điểm đang đo là 1 thách thức. Ngoài ra độ chính xác còn phụ thuộc vào khoảng cách giữa trạm cơ sở và trạm động, số lượng vệ tinh quan sát đồng thời và tốc độ di chuyển của xe nâng container.
Tuy nhiên, với độ chính xác trung bình ở mức dm, phương pháp đo RTK hoàn toàn phù hợp với bài toán xác định vị trí container tự động.
C. ỨNG DỤNG CÔNG NGHỆ RTK - GPS ĐỂ XÁC ĐỊNH VỊ TRÍ CONTAINER
Qua phân tích các phương pháp đo động thời gian thực thì RTK GPS là khả thi hơn cả vì độ chính xác cao và giá thành hợp lý. Hơn nữa, mô hình RTK GPS hoạt động ổn định, không phụ thuộc vào môi trường.
Mô hình RTK – GPS ứng dụng để xác định vị trí của Container trong Cảng như sau:
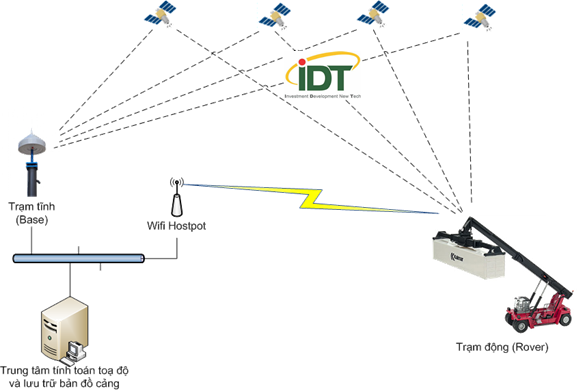
Mô hình ở đây bao gồm 01 trạm tĩnh được xây dựng tại vị trí đã xác định (sai số dưới mm). Trạm tĩnh sẽ thu tín hiệu vệ tinh để so sánh giữa tọa độ vệ tinh thu được với tạo độ chuẩn hiện tại của nó để tính ra sai số và gửi sai số này tới trạm động Rover (xe nâng container) để trạm Rover hiệu chỉnh lại tọa độ của nó.
Diện tích của Cảng Đình Vũ khá nhỏ với một chiều rộng 500m và chiều dài khoảng 600m, nên phương pháp gửi tín hiệu cải chính từ trạm Base đến trạm Rover thông qua sóng Radio là tối ưu bởi các lý do sau;
· Bộ Radio được thiết kế để truyền dữ liệu cải chính vươn tới độ xa 10 Km.
· Trong khoảng cách 600m tín hiệu Radio rất mạnh, ổn định chống lại được các hiện tượng gây nhiễu do các chồng container gây ra.
Sau khi nhận được tọa độ đã đươc hiệu chỉnh từ trạm Rover, phần mềm quản lý trạm Rover trên xe nâng container sẽ căn cứ vào tọa độ cơ sở dữ liệu có sẵn để xác định được Bay, Row, Tier của container vừa được hạ xuống.
Sai số tọa độ tại trạm Rover theo chiều dọc và ngang sau khi đã được cải chính sẽ nhỏ hơn 10 cm.
Cấu hình hệ thống RTK-GPS tại Cảng Đình Vũ
1.Trạm Base: 01 bộ.
· Gồm 01 antenna thu tín hiệu vệ tinh đăt trên nóc kho.
· Một bộ xử lý trung tâm đăt trong văn phòng kho.
· Cáp tín hiệu kéo dài được nối từ Antenna thu tới bộ xử lý trung tâm
2.Bộ phát tín hiệu cải chính qua sóng Radio: 01 bộ.
· Gồm 01 bộ phát sóng Radio đặt trong văn phòng kho.
· 01 antenna đặt trên đỉnh cột GPS có sẵn.
· 01 cáp tín hiệu được nối từ 01 bộ phát Radio tới antenna trên đỉnh cột và mô hình antenna GPS và cột phát radio trong thực tế như ảnh dưới:

3.Trên xe nâng container.
Đặt trên 01 xe nâng container gồm các thiết bị sau:
· 01 Antenna rời thu tín hiệu vệ tinh đặt trên nóc của xe.
· 01 bộ xử lý đặt trong xe.

· 01 Antenna thu tín hiệu cải chính đặt trên nóc xe nâng.
· Các phụ kiện:
+ 01 dây tín hiệu nối từ Antenna GPS đến bộ xử lý.
+ 01 cáp tín hiệu nối từ Antenna thu tín hiệu Radio cải chính đến bộ xử lý đặt trên xe.
+ 01 Cáp RS232 để nối với máy tính công nghiệp hiện có trên xe.
+ 01 bộ ổn áp nguồn điện để cấp điện từ hệ thống điện của xe nâng.
+ 01 phần mềm giao tiếp với người lái xe để lái xe xác nhận container, cho phép đọc thông tin tọa độ và gửi về máy chủ.
D. PHƯƠNG PHÁP XÁC ĐỊNH VỊ TRÍ CỦA CONTAINER
Một container sẽ được xác định vị trí bởi tọa độ x, y và cao độ h.
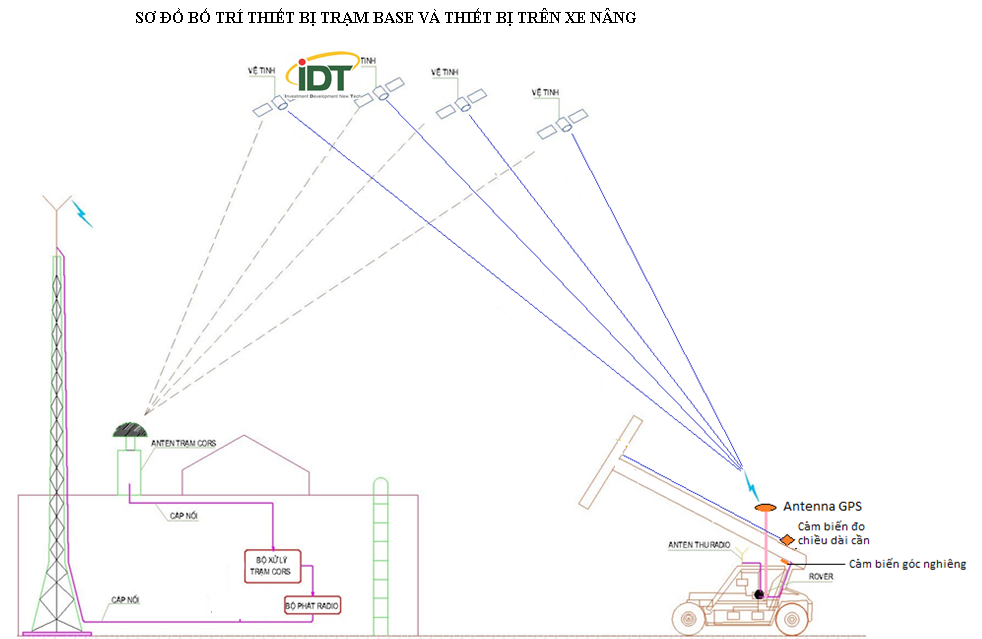
Giải pháp RTK – GPS cho phép đo chính xác cả 03 số liệu trên tuy nhiên khi áp dụng vào thực tế cảng thì nó sẽ phát sinh vấn đề sau: Khi antenna thu tín hiệu vệ tinh và và antenna thu tín hiệu cải chính từ trạm Base đặt quá gần các chồng Container thì sẽ tín hiệu thu được bị nhiễu và không thể xác định được tọa độ hiện tại. Do vậy cả hai antenna đều phải đặt trên nóc của xe nâng để đảm bảo việc xác định tọa độ luôn luôn chính xác. Như vậy hệ thống RTK – GPS chỉ mới cho phép xác định được tọa độ của xe nâng mà thôi.
Để xác định vị trí thực đặt Container thì cần biết khoảng cách từ tọa độ của xe đến tọa độ đặt container và cao độ của container so với mặt đất. Ta sử dụng 02 loại cảm biến để có được các số liệu trên:
Cảm biến đo góc nghiêng và Cảm biến đo chiều dài

01 cảm biến đo góc nghiêng sẽ được ốp sát vào cần nâng của xe nâng. Khi tay cần của xe nâng nghiêng với mặt đất bao nhiêu độ thì cảm biến sẽ đo và truyền tín hiệu về bộ xử lý trung tâm..
Cảm biến nghiêng có độ chính xác 0.5% độ cho phép xác định chính xác góc nghiêng của tay cần xe nâng so với mặt đất.
Cảm biến góc nghiêng gồm có 02 phần.
Phần hộp dây: Là một cuộn dây có chiều dài 20m, một đầu của cuộn dây sẽ được cố định vào khung gắp Container. Khi tay cần của xe nâng được kéo dài đến đâu thì sợi dây sẽ được kéo dài theo đến đó. Khi lái xe thu cần về thì cuộn dây được cuộn lại tự động nhờ hệ thống lò so trong hộp.
Phần Encoder: Khi chiều dài của dây thay đổi thì hệ thống truyền động bên trong cảm biến sẽ làm biến trở xoay và làm thay đổi điện áp ra từ 0 – 5V. Điện áp này là tuyến tính với chiều dài cuộn dây. Căn cứ vào mức điện áp đo được từ sensor gửi về, bộ xử lý trung tâm sẽ tính được chiều dài của cuộn dây hay chính là độ dài tay cần của xe nâng.
Biết được chiều dài tay cần, góc nghiêng của tay cần cùng các tham số cố định của xe ta hoàn toàn tính được chính xác vị trí của xe nâng và độ cao của Container ở vị trí vừa hạ đặt.
Với sai số rất nhỏ của cảm biến đo chiều dài và đo góc nghiêng nêu trên thì độ cao H của container được tính toán từ 02 cảm biến nêu trên có sai số nhỏ hơn 10cm
E. SƠ ĐỒ BỐ TRÍ THIẾT BỊ TRẠM BASE VÀ THIẾT BỊ TRÊN XE NÂNG
F. GIẢI PHÁP PHẦN MỀM
Hệ thống gồm 03 phần mềm:
1. Phần mềm tính toán tọa độ
Bao gồm các chương trình:
· Chương trình tính toán tọa độ của trạm Base.
· Tính toán số liệu cải chính
· Tính toán tọa độ của trạm Rover trên cở sở tích hợp dữ liệu từ vệ tinh và dữ liệu cải chính gửi từ trạm Base.
Các chương trình này đã được nạp sẵn vào trạm Base và Rover.
2. Phần mềm đọc vị trí Container trên xe nâng
Phần mềm này được cài đặt trên xe nâng và thực hiện các chức năng sau:
· Đọc dữ liệu tọa độ gửi về từ trạm Rover
· Đọc dữ liệu từ cảm biến đo chiều dài và đo góc nghiêng.
· Gửi các dữ liệu trên về máy chủ.
· Nhận và hiển thị vị trí container trên máy tính công nghiệp trên xe nâng.
· Tạo giao diện tối giản để giao tiếp với người lái xe.
3. Phần mềm trên máy chủ
Cài đặt trên máy chủ đặt tại phòng máy chủ của Cảng Đình Vũ.
Chức năng của phần mềm này như sau:
· Xây dựng bản đồ vị trí container trong cảng.
· Nhận dữ liệu tọa độ, chiều dài góc nghiêng từ phần mềm cài đặt trên xe nâng.
· Tính toán ra vị trí của container
· Gửi trả kết quả vị trí về phần mềm trên xe nâng.
· Trao đổi kết quả định vị thời gian thực với phần mềm PLC-TOS của Cảng Đình Vũ, đưa kết quả trực tiếp từ hệ thống RTK-GPS vào thẳng hệ thống phần mềm quản lý container của Cảng Đinh Vũ.
· Việc truyền nhận dữ liệu giữa phần mềm trên xe nâng hàng và phần mềm trên máy chủ được thực thông qua hệ thống mạng Wifi của Cảng. Tuy nhiên trong trường hợp hệ thống Wifi bị hỏng các phần mềm của hệ thống RTK-GPS vẫn cho phép hoạt động Offline đảm bảo tính liên tục trong hoạt động xếp dỡ container trong cảng.
G. HÌNH ẢNH THỰC TẾ THIẾT BỊ LẮP ĐẶT TRÊN XE NÂNG CỦA CẢNG ĐÌNH VŨ
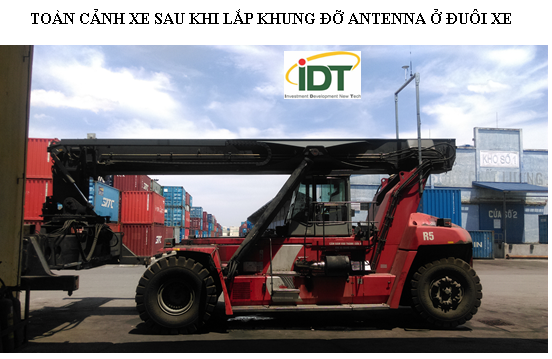
TOÀN CẢNH XE SAU KHI LẮP KHUNG ĐỠ ANTENNA Ở ĐUÔI XE

HÌNH ẢNH ANTENNA TRÊN KHUNG ĐỠ

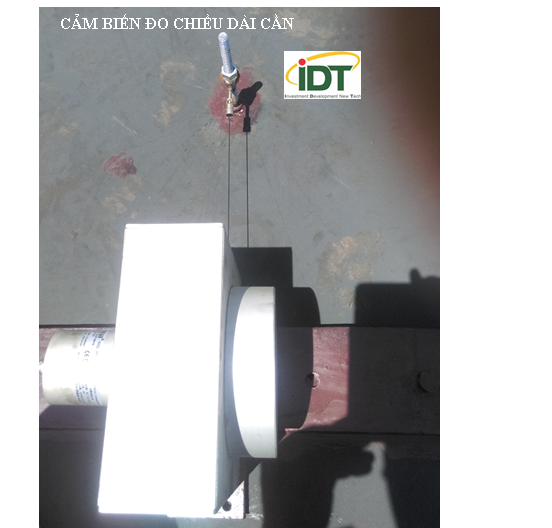
CẢM BIẾN ĐO GÓC NGHIÊNG VÀ CẢM BIẾN ĐO CHIỀU DÀI CẦN
CẦN THÊM THÔNG TIN VỀ MỘT SỐ NGHIỆP VỤ TRÊN XE NÂNG CONTAINER KHI ỨNG DỤNG GIẢI PHÁP ĐỊNH VỊ TỰ ĐỘNG VỊ TRÍ CONTAINER THEO AREA – BAY – ROW – TIER, XIN MỜI THAM KHẢO LINK: http://www.idtvietnam.net/dich-vu-sua-chua-bao-tri-thiet-bi-datacenter/tu-van-thiet-ke-trung-tam-du-lieu/tu-van-thiet-ke-he-giai-phap-nang-ha-cong-tainer-tai-cang.html

Trụ sở Tp. Hồ Chí Minh: Văn phòng 2, Tầng 8, Tòa nhà Pearl Plaza - 561A Điện Biên Phủ, Phường 25, Q. Bình Thạnh
Trung tâm DVKH: 4-6 Phạm Thận Duật, P. Thạnh Mỹ Lợi, Tp. Thủ Đức
CN Hà Nội: Tầng 4 tháp T2 Toà nhà Times Tower, HACC1, 35 Lê Văn Lương, Nhân Chính, Q.Thanh Xuân
CN Đà Nẵng: 135/1 Huỳnh Thúc Kháng, P.Bình Hiên, Q.Hải Châu
HOTLINE: 0932 648 965 - Email: info@idtvietnam.net


Bình luận
Xem thêm